week2-5 <<
Previous Next >> week10-14
week6-9
week6
一、 V-rep 模型控制
1.先到task1下載V-rep 3.6.1 rev 4.7z 和 web_vrep2.zip 至隨身碟。
2.點開載好的 V-rep3 進到 vrep_pro_edu 檔案夾並按下 vrep.exe。
3.開啟後將 web_vrep2 裡的 two_wheeler.ttt 拖進去。
4.執行 web_vrep2 裡的 app.py。
5.輸入 localhost:5000 開啟遙控器就可以執行操作了。
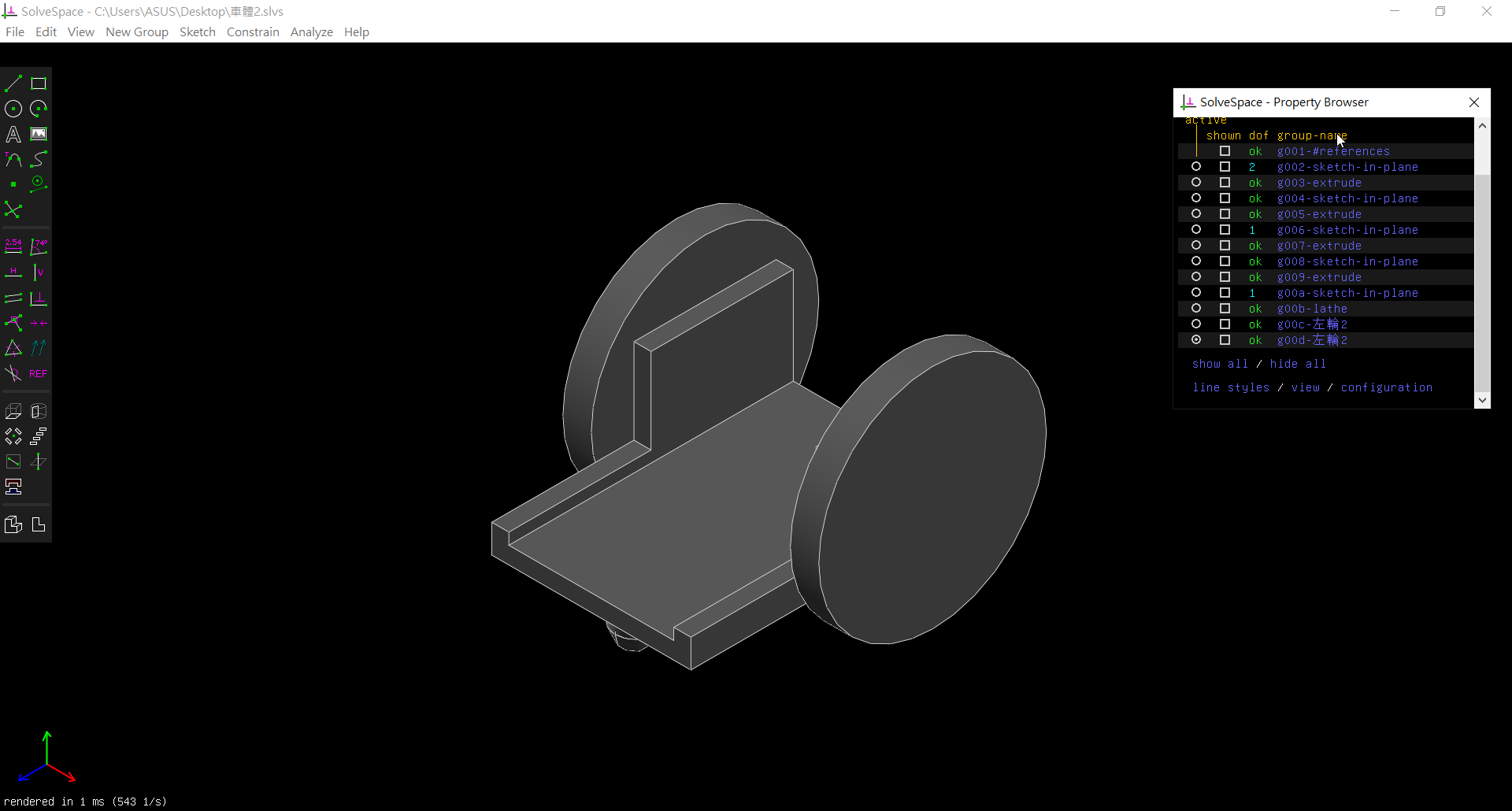
二、參數化零組件繪製
1.繪製車身,畫一個凹形然後長出。
2.以兩側平面其中一面做為工作面,並繪製矩形來切割。
3.再畫一個小圓並做切割。
4.以底面做為工作面,並長出一個圓柱,在長出的圓柱面上做迴轉長出一個半圓,來繪製後轉輪。
5.存檔並再開啟新檔來繪製車輪。
6.繪製完車輪再存檔,然後開始組裝。
↓↓↓ 成品圖 ↓↓↓
三、新增開始停止紐
1.進到課程網站的倉儲裡的issue尋找#14。
2.開起隨身系統,並進入web_vrep2裡開啟templates中的controls.html。
3.更改紅色空格處<td><a class="pure-button pure-button-primary" href="/do/ "_____">_____</a></td>分別加入start和stop的按鈕。
4.用小白框開啟vrep_linefollower,並定義start和stop按鈕。
if direction == 'start':
vrep.simxStartSimulation(self.clientID, vrep.simx_opmode_oneshot)
elif direction == 'stop':
vrep.simxStopSimulation(self.clientID, vrep.simx_opmode_oneshot)
5.最後要記得補上else然後對齊好。
6.執行 web_vrep2 裡的 app.py來開啟 localhost:5000 後就可以操作了。
week7
solvespace納入學號
1.到自己的solvespace>build>src>CMakefiles>solvespace.dir 找 solvespace.cpp 並刪除。
2.開啟隨身套件。
3.回到 solvespace 進入 src 找到 solvespace.cpp 拉進小白框編輯。
4.ctrl+f 搜尋 GPL 。
5.把 message 下的"This is SolveSpace"改成"This is SolveSpace is compiled by 學號"。
6.改完並儲存後打開solvespace點開頁面上的about即可查看。
week2-5 <<
Previous Next >> week10-14